电 话:15619273361
Q Q:1647950652
邮 箱:1647950652@qq.com
网 址:www.ding-instrument.com
地 址:陕西省西安市蓝田县规划一路1号三元科技创新园C3-2栋
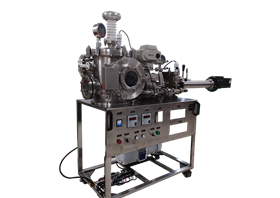
大容量高压脉冲破碎传送装置
说明书
一.装置组成
本装置总共分为四个功能单元:
1.链板传送单元
主要功能是在设定的传送速度下实现物料从入口经过水箱放电区域至出口的稳定传输;
2.可调高压电极单元
主要功能是按照实际需要实现高压电极组件的垂直运动,并可以满足可靠施加高频脉冲高电压的要求;
3.水箱和机架单元
主要功能是提供装置所需要的放电水环境,满足注水、放水、清渣和放电区域观察等要求;
4.操作控制单元
主要功能是通过人机交互界面实现装置的集中供电、运动控制、运动监测等功能;
二.装置各子单元的主要结构、原理及用途
1.链板传送单元
①.整体采用了304不锈钢链板结构。包含了主动链轮、被动链轮、导向链轮、导向轨道及活节链板共同组成了传送的主要结构;
②.主动链轮位于物料出口端,采用带变频电机的涡轮蜗杆减速机构做为动力源,在满足低传送速度要求的情况下具有较宽的调速范围。
③.被动链轮位于物料进口段,在主动链轮的带动下被动旋转,与主动链轮一起保证了金属活节链板的稳定运行;
④.导向链轮安装于机架的底部,分两个方向对称分布,保证了链板在运动出水箱后在机架底部能够沿水平方向稳定运行;
⑤.导向轨道一部分安装于水箱内部的金属支架上,另一部分安装于机架之上。通过导向轨道保证了链板在水箱中的运行方向和角度符合设计需要;
⑥.金属活节链板的正面通过焊接安装了高度1cm间距约40cm的挡边,以便能够在链板运行过程中的坡度部分防止物料大量滑落。挡边上扣压了绝缘覆盖层以防止发生在较高点处局部放电。活节链板的两边安装了特制的裙边,在保证链板运动的灵活性的基础上有效防止了物料从链板两边散落;
⑦.链板机构的物料入口端安装了入口料斗,出口端安装了出口料斗。
2.可调高压电极单元
①.高压电极主要由绝缘套管、电极杆、屏蔽外壳组成。在满足施加高频高电压要求的基础上尽量减少对周边环境的影响;
②.电压输入端安装了均压球,以防止在高压输入端出现局部放电;
③.屏蔽筒顶部安装了绝缘的顶盖,以防止接线部分出现意外;
④.高压电极垂直安装在一个水平圆形托架上,圆形托架通过两个侧法兰连接于垂直安装的线性滑轨上,通过中间法兰固定于垂直安装的滚珠丝杠副上。滚珠丝杠副通过上下轴承位安装于装置支架上并进行了同心度校准。滚珠丝杠副通过安装于顶部轴端的步进电机带动,从而实现整个电极的上下垂直运动。
⑤.为了防止整体托架意外滑落,在线性滑轨上安装了限位块。
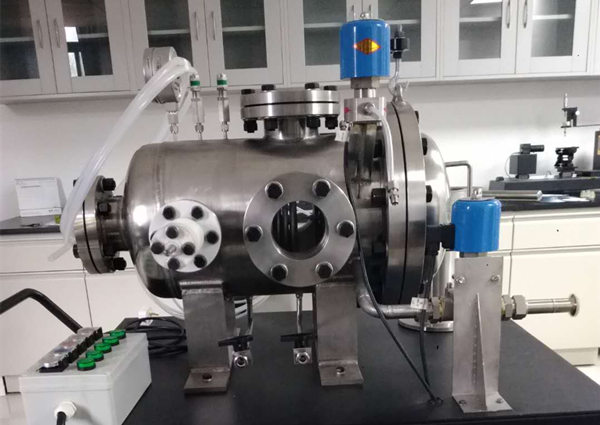
3.水箱和机架单元
①.水箱采用了304不锈钢制作,可以保证在长期与水接触的情况下仍然保持原色,并便于清洁清扫;
②.水箱底部安装了支架主要用于安装金属链板的导轨部分并具有足够的承力结构;水箱两侧采用了角度与链板运行角度基本相同的坡度机构,有利于链板背面附着物下落至水箱底部便于清理,也尽量保证的机构的对称美观;
③.水箱前面板中间位置设置了观察窗,可以局部观察到水中的放电情况。水箱前面板左上角设置了进水口并安装了进水阀,左下角设置了放水口并安装了防水阀。水箱前面板右下角设置了清渣口,便于定期清理水箱底部的沉积物,不需要打开时用盲板法兰封堵。
④.水箱支架的上方采用有机玻璃搭建了防护罩,以便防护可能发生的放电区域的水飞溅并防止高压电极对水箱壁放电;
⑤.水箱通过滚轮推入机架相应的固定位置,并通过内部支架与链板导轨相连,保证了整体结构的稳定性。
⑥.机架整体采用了方钢进行搭建,尽量减少了装置重量并保证了装置在运行过程和运输过程中的刚性,有利于提高装置的长期可靠性;
⑦.机架底部安装了四对万向脚轮,方便装置在较为平整的地面上的移动和小空间里的位置调整。其中有两对脚轮带有刹车功能,便于短期锁紧。机架底部安装了四对升降底脚,当设备位置固定后可升起底脚保证设备安装更加稳定牢靠;
⑧.机架表面进行了7035号喷塑处理,防水性能良好,色泽鲜亮,与其它部件形成了较为和谐的风格搭配。
4.操作控制单元
①.本单元包含了控制柜、执行机构和传感器;
②.控制柜采用液晶屏为人机交互界面,PLC为控制核心。通过控制柜操作可以实现对高压电极垂直运动的自动控制和手动点动控制;可以实现对链板运行速度的五级调节;可以对料斗振动器进行开关控制;可以通过安装在主动链轮轴上的编码器采集链板实时运行速度,便于操作者根据需要进行速度调节;
③.控制执行机构为步进电机、链板驱动电机和料斗振动器。控制传感器装置为测量链板速度的编码器和对电极运动进行限位控制的对射式光电开关;
④.通过液晶屏可以实现链板速度调节、电极位移调整等动作;
⑤.控制柜负责220V用电的接入和各用电元件的用电分配。
三.装置的主要技术指标
①.高压电极可接入高频电压最 高300KV;
②.高压电极最 大位移500mm;
③.水箱容积约1.5m3;
④.链板速度调节范围0~15m/min.;
⑤.物料输送能力约500Kg/h;
⑥.装置运行供电电压220V,50Hz;
⑦.装置运行最 大功率约1.5KW.;
⑧.设备总高约1.6m~2.1m,总长约3.35m,总宽约1.2m;
⑨.装置物料进口高度约1.45m,物料出口高度约0.7m
⑩.装置总重约600Kg。
四.装置总体结构及简图
如下图所示:
五.装置操作流程
1.基本操作过程:
①.打开总电源开关,系统所有用电元件上电,与各装置有关的电源指示灯亮起,液晶屏进入首屏状态。点击“进入系统”按钮,系统进入操作界面;
②.通过操作界面,调节高压电极运动机构的位置至合理值;
③.输入链板运动速度,确认无误后,按下链板运行开关,链板开始运行;
④.从料斗人工加入待处理矿料,需要时开启料斗振动器;
⑤.当停止加料且待处理矿料已经全部输送至末端时,可根据需要按下链板开关停止运行;
⑥.当出现意外和危险时可紧急按下控制箱面板上的急停开关,或者断开电源开关,整个系统断电。;
2.用户界面介绍及使用:
①.整个控制柜面板自上而下分为显示操作单元、料斗振动单元和系统供电单元。在最下方预留了高频电源安装位。;
②.当打开供电单元的总开关后,装置各个需要供电的部分的供电指示等亮起,说明系统整体供电正常;

③.当打开料斗振动开关时,振动器工作(注意只有液晶屏中振动开关也同时开启时手动开关才能正常起到振动作用);

④.液晶屏界面
a.界面介绍
液晶屏界面分为三层:
第一层为开机画面,开机画面显示系统名称、单位名称并有“进入系统按钮”;第二层为自动工作控制层。画面上半部分为设备图样、电极当前位置显示、链板运行实时线速度显示。画面右半部分为电极位置设定、链板运行速度设定。画面左半部分有电极运动开关、链板运动开关、振动器开关并预留了高压放电开关。画面的右下角有三个黄色按钮分别为“输入输出”、“电极手动”、“参数设置”。按下黄色按钮会进入界面第三层。对用户有用的第三层仅为“电极手动”操作界面,进入该界面用户可以对高压电极进行上下点动任意控制。其它为装置内部参数设定,用户不允许任意改动,改动后会影响装置的正常工作;
第一层画面:

第二层画面:

第三层画面:

b.用户参数的设定
链板运动速度:在第二层画面中进行设置,用户可以采用“+”和“-”号来进行数据的增减,当数据变大时运行速度加快,当数据变小时运行速度减慢。也可以通过直接更改数据框中的数据。在运行过程中,数据也是可以随时更改的,链板将在3~5秒里达到设定值。
下降位置设定:下降位置指高压电极的下降位移。本装置以高压电极运动到最 高点时的位置为“零”位,下降位置以零位为基准。当设定好数值后,按下电极运动开关,高压电极会从当前位置首先移动到零位,然后下降至设定位置自动停止。
c.电极手动点动
当电极自动位移功能无法满足装置的灵活调节时,用户可选用电极手动功能。点击第二层界面右下角的“电极手动”按钮,系统进入第三层界面。当需要电极往上运动时按下电极上开关电极向上运动,松开后电极停止。当需要电极往下运动时按下电极下开关电极向下运动,松开后电极停止。持续按下开关,则电极也持续运动。
六.其它补充说明
1.高频高电压引入时,高压电缆走线尽可能和各带电元器件距离200mm以上,以免电场会影响器件的正常工作;
2.装置安装了高压电极运动位置上下限的限位开关,当达到限制位时电极会自动停止,此时手动点动只对回程有效;
3.由于结构原因,高压电极运动的驱动电机未安装自锁减速装置,当系统带电时,步进电机有自锁功能,当系统断电后,电极可能会在自重影响下垂直下落。线性滑轨上安装了限位挡块,防止下降过度对链板造成损伤;
4.当系统断电重启后,在自动运行模式下,高压电极会自动运行至零位或者预先设置的位置,待接受了新的数据指令后重新调整。
5.为保证装置正常使用,链板有关结构及水箱需要可靠接地。由于放电容量大,最 好单独接地以避免对同时使用的其它设备造成不良影响。
6.说明书未尽事宜,若有不清楚时,可以咨询生产厂家技术人员。
西安鼎业流体科技有限公司
2021年06月
联系方式
手 机:15619273361
Q Q:1647950652
邮 箱:1647950652@qq.com
网 址:www.ding-instrument.com
地 址:陕西省西安市蓝田县规划一路1号
三元科技创新园C3-2栋

扫一扫 关注我们